Hallo erst mal,
veilleicht als erstes mal kurz, zum Verständniss, wir reden über die Robtargets und nicht über die Tooldaten? Ist das richtig?
zu 1.:
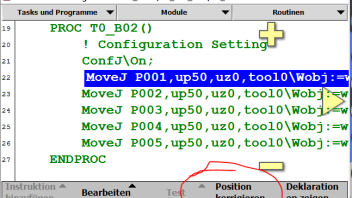
Die Robtargets kannst du mit Position Korregieren ändern. Zuvor musst du den Roboter auf die neue Possition bewegen.
nach der obigen deklaration sind die Robtargets oben global, d.h. du kannst sie in jeder Routine und jedem Modul verwenden.
zu 2.:
Du kannst die Robtargets auf verschieden weisen an fahren: z.B. wie oben Menü, ProgrammEditor, Test, PZ auf Routine und dann dort auf die jeweilige Zeile auswählen und mit PZ->Curser den Programmzeiger auf die Zeile setzen. Jetzt kannst du den Punkt anfahren.
Oder:
Menü, Bewegen

Bwegen zu nun Punkt auswählen und zur Position bewegen den Punkt anfahren.
Wichtig hierbei ist, dass das richtige Tool und Werkobjekt ausgewühlt ist.

Zu 3.
Das kommt darauf an, wie du den Punkt angefahren hast. Wenn du ihn in einem Anderen Werkopjekt angefahren hast z.B. in wPP2 und jetzt im Programm auf in wBP1 dann liegt der Punkt wo anderster.
die X,Y,Z Werter beziehen sich auf den Ursprung des jeweiligen Werkobjektes in deiner Bewegungszeile oben auf wBP1. Werkobjekt bezieht sich auf das Werkobjekt wobj0, dieses leigt in der Regel im Sockel des Roboters. Hier ist die Hilfe in Robotstudio nicht schlecht.

In Rapid-Überblick kannst du dir mal folgendes ansehen:

Gruß Stingray







